Portfolio

Hi! I am Farhan, a full-time Software Developer. I am eager to contribute in cutting-edge research and product development. I am proficient in C/C++, Python, and data analytics and experienced in robotics and IoT projects.
Hardware Experience
Development Boards
- STM32 Minimum System Board (STM32F103ZET6)
- STM32 Bluepill (STM32F103C8T6)
- Nucleo-64 Boards (NUCLEO-F303RE, NUCLEO-F446RE)
- Raspberry Pi (RPi 4 Model B, RPi 3 Model B+)
- ESP 32 (Dev Kit V1)
- Arduino MEGA 2560
- Arduino UNO/Nano
Communication Protocols
- Controller Area Network (CAN)
- Universal Synchronous and Asynchronous Receiver-Transmitter (USART)
- Inter-Integrated Circuit Protocol (I2C)
- Serial Peripheral Interface (SPI)
- Message Queuing Telemetry Transport (MQTT)
- Long Range Wide Area Network (LoRaWAN)
- Zigbee
Projects
Case Study for Google Data Analytics Professional Certificate Capstone - How does a bike-share navigate speedy success (December 2023)
In this case study, I analyzed bike-sharing data for one quarter and recommended promotional strategies that the company should implement to maximize profit. My main focus in the analysis was to understand how casual riders and annual members use bikes differently. By understanding these differences, my team could then develop strategies to convert casual riders into annual members.
Used Technologies: Spreadsheets, R (Programming Language), Posit (RStudio) Cloud and R Markdown.
The complete case study with visualizations is available on my Kaggle profile.
Completion Certificate Here
Project for Google IT Automation with Python Professional Certificate Capstone - Automated product upload system for online fruit store (December 2022)
In this project, I developed a Python Script that updates the catalog information with data provided by the fruit suppliers. When each supplier has new products for the store, the script automatically uploads the new products to the online store with the Images and descriptions uploaded separately using two different web endpoints. A report is generated automatically and sent via email to the suppliers. As this process is key to the business, I ran a script to constantly monitor the health of the system and send email alerts if any problem is detected.
Used Technologies: Linux system administration, Bash, Git and Python (Programming Language).
Completion Certificate Here
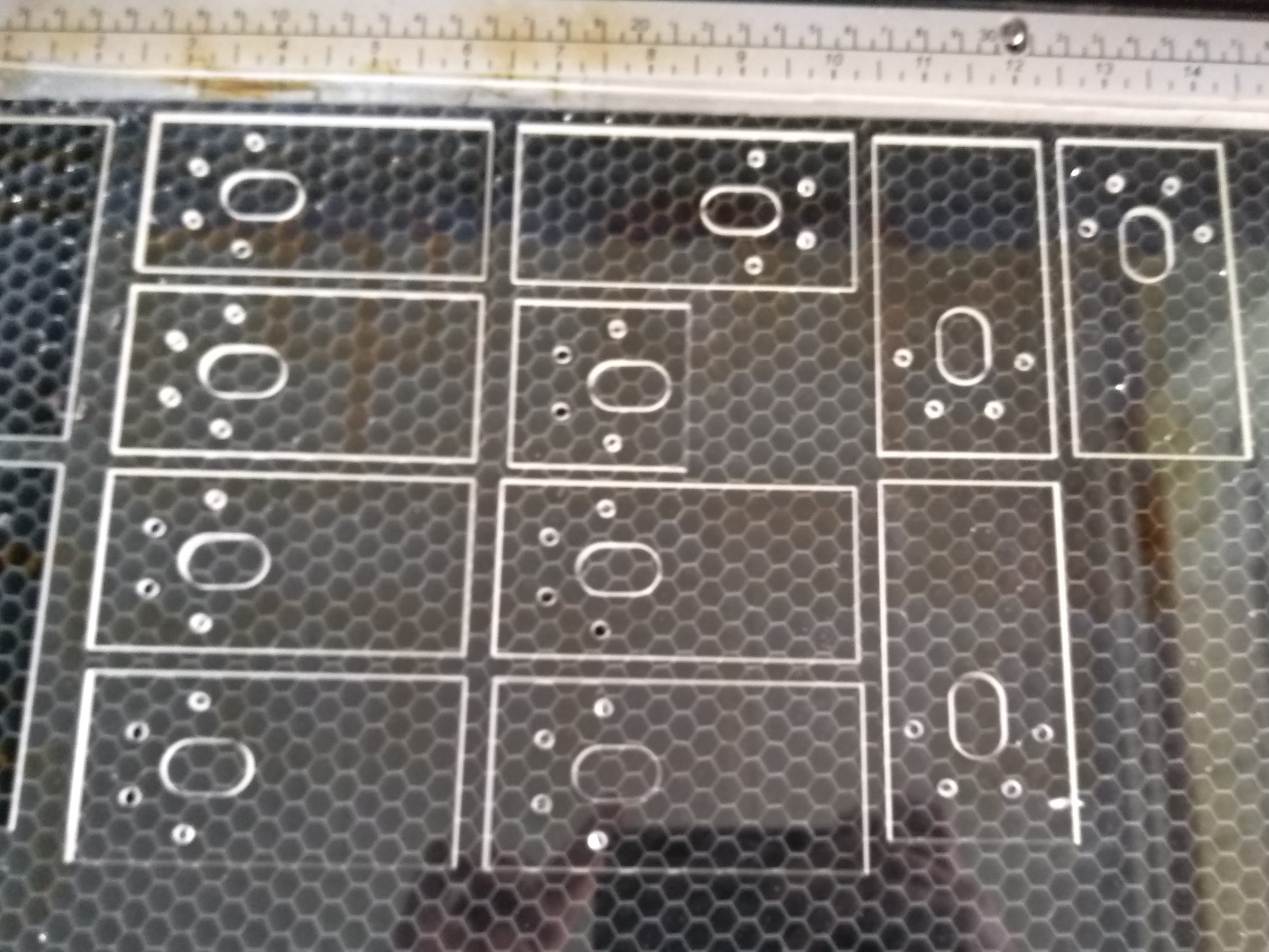
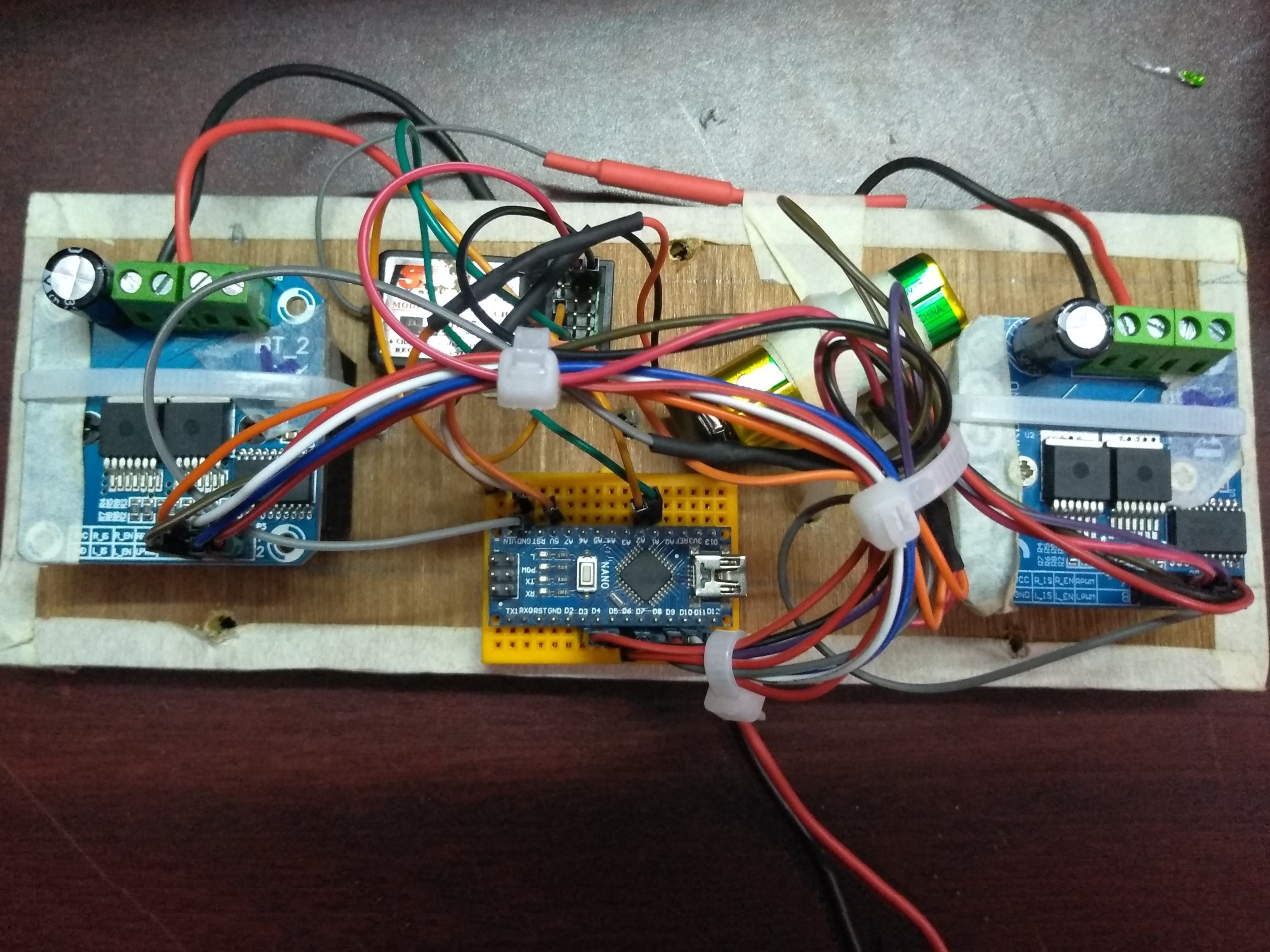
Featherweight Battle Bot (April 2022)
Designed a wedge shaped Featherweight (15Kg weight class) Battle Bot with an active weapon system. I implemented the electrical control systems for the robot and made some adjustments to integrate a powerful motor containing toothed spinner to use as a weapon during the conpettition. The wheel of the motor is customized to get firm grip on the surface. The wireless control system was cheap and easy to maintain. The body of the robot is designed such that it can withstand the impact of ramming of the opponents. A steel frame with load balancing structure is designed containing irregular shape which makes it difficult for the opponents to ram with huge impact.
Used Technologies: Arduino Nano, BTS-7960 Motor Driver, 2.4 GHz RC Transmitter Receiver Pair, Lipo Battery and Arduino IDE.
 |
 |
 |
 |
| Laser Cut Motor Mounts | Physical Structure of the Battle Bot | Control Circuits | Complete Assembly of the Conmponents |
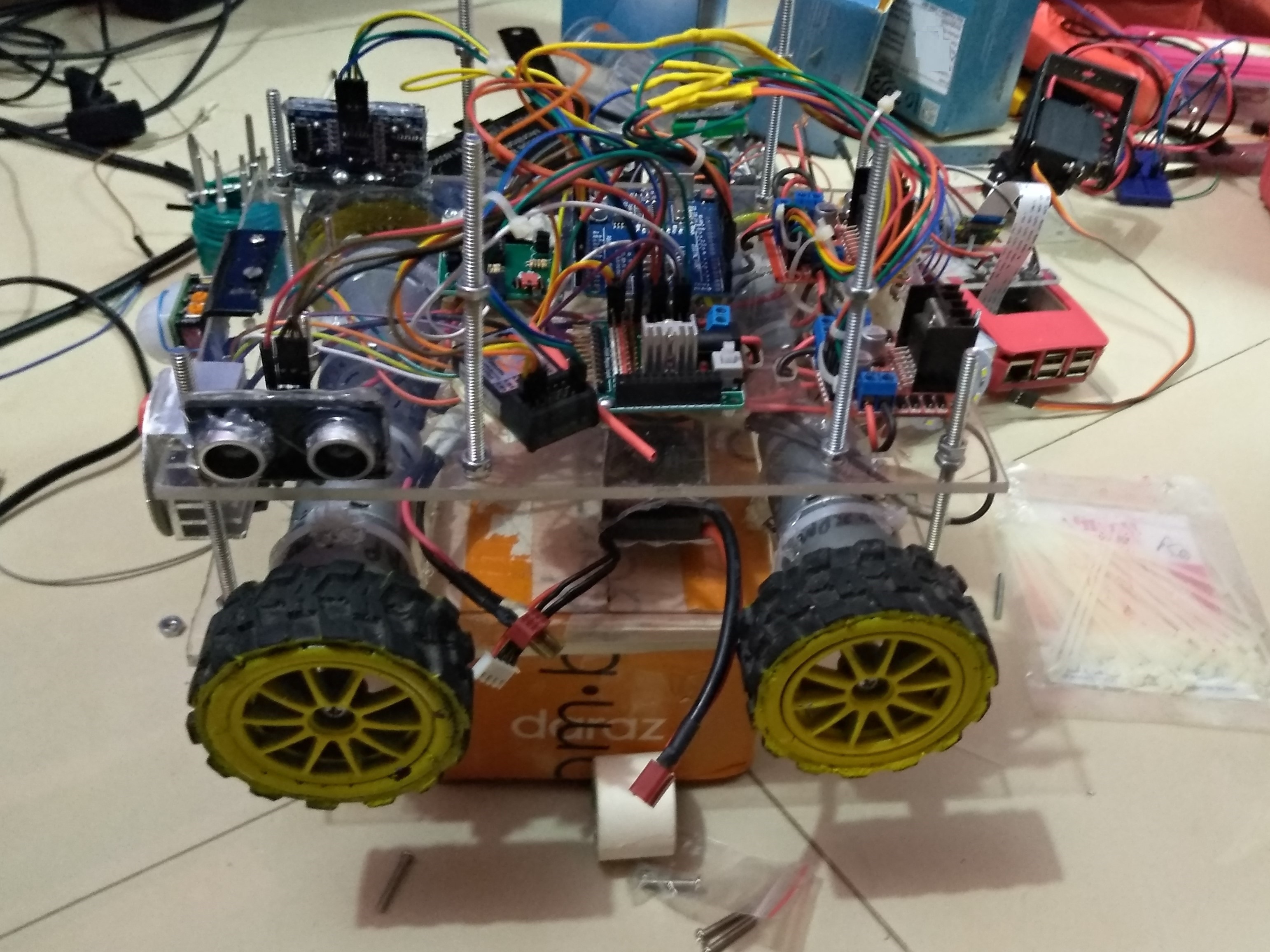
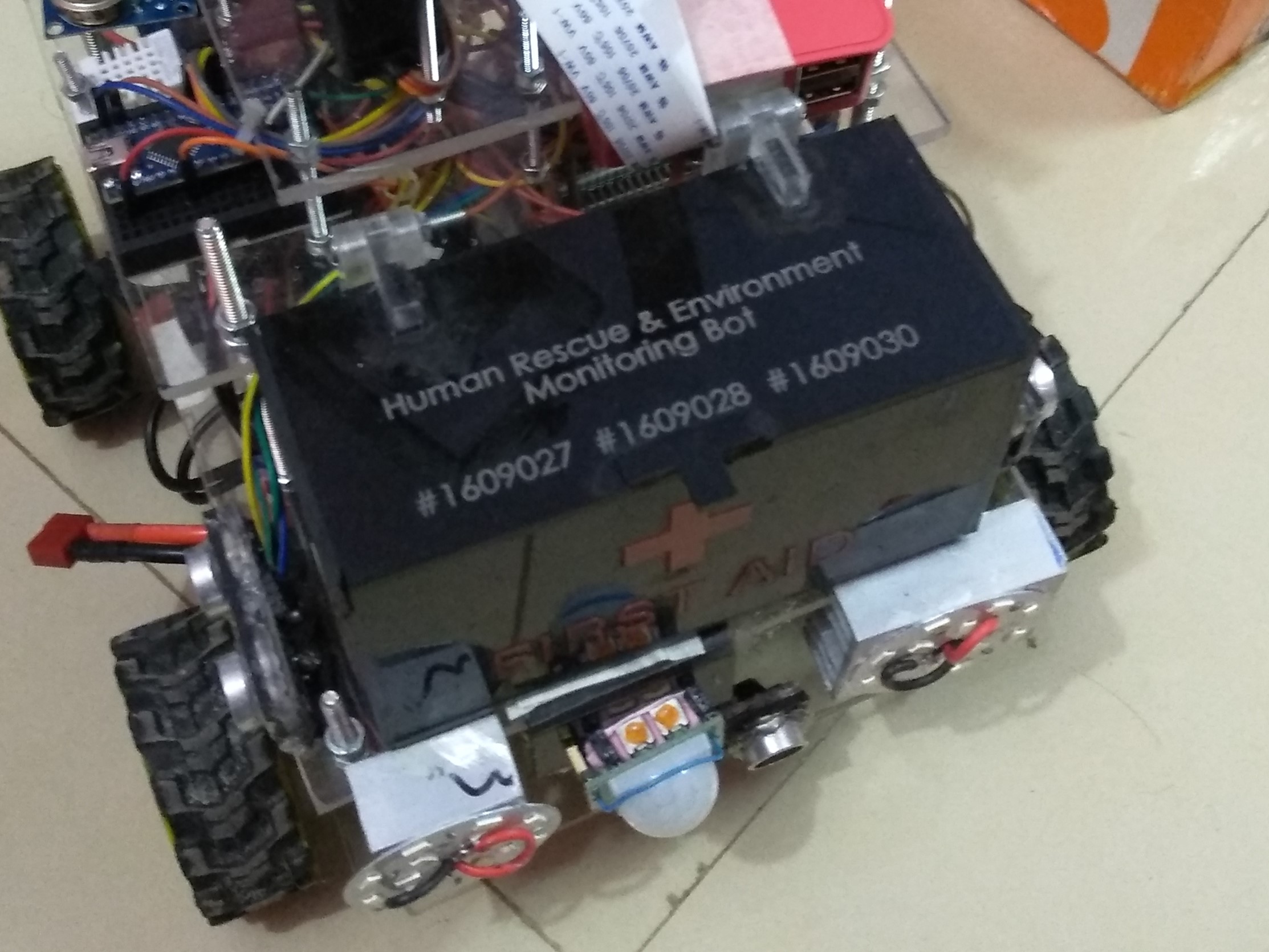
Human Rescue & Environment Monitoring Bot (October 2019)
Type: Academic (Team Project)
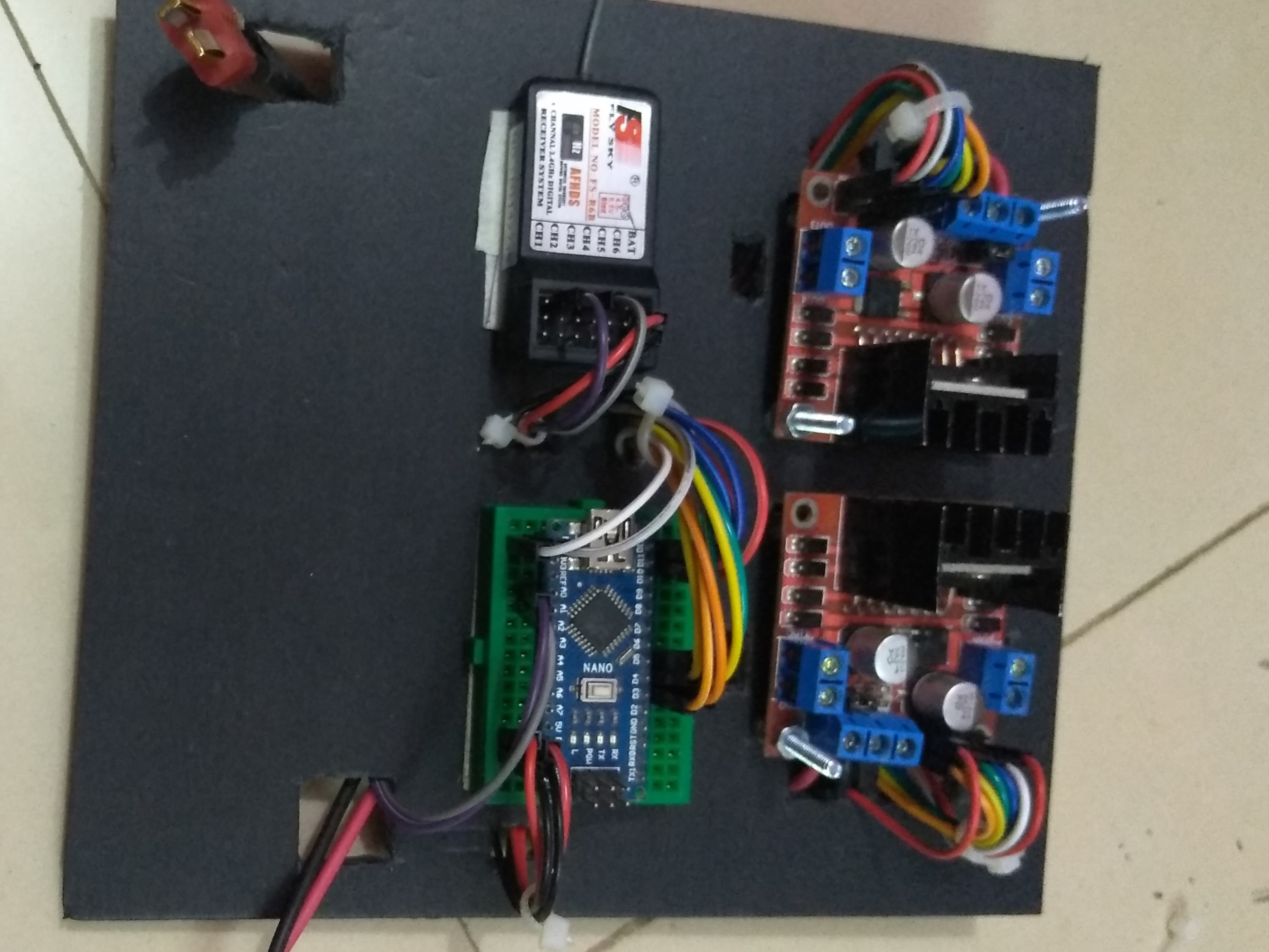
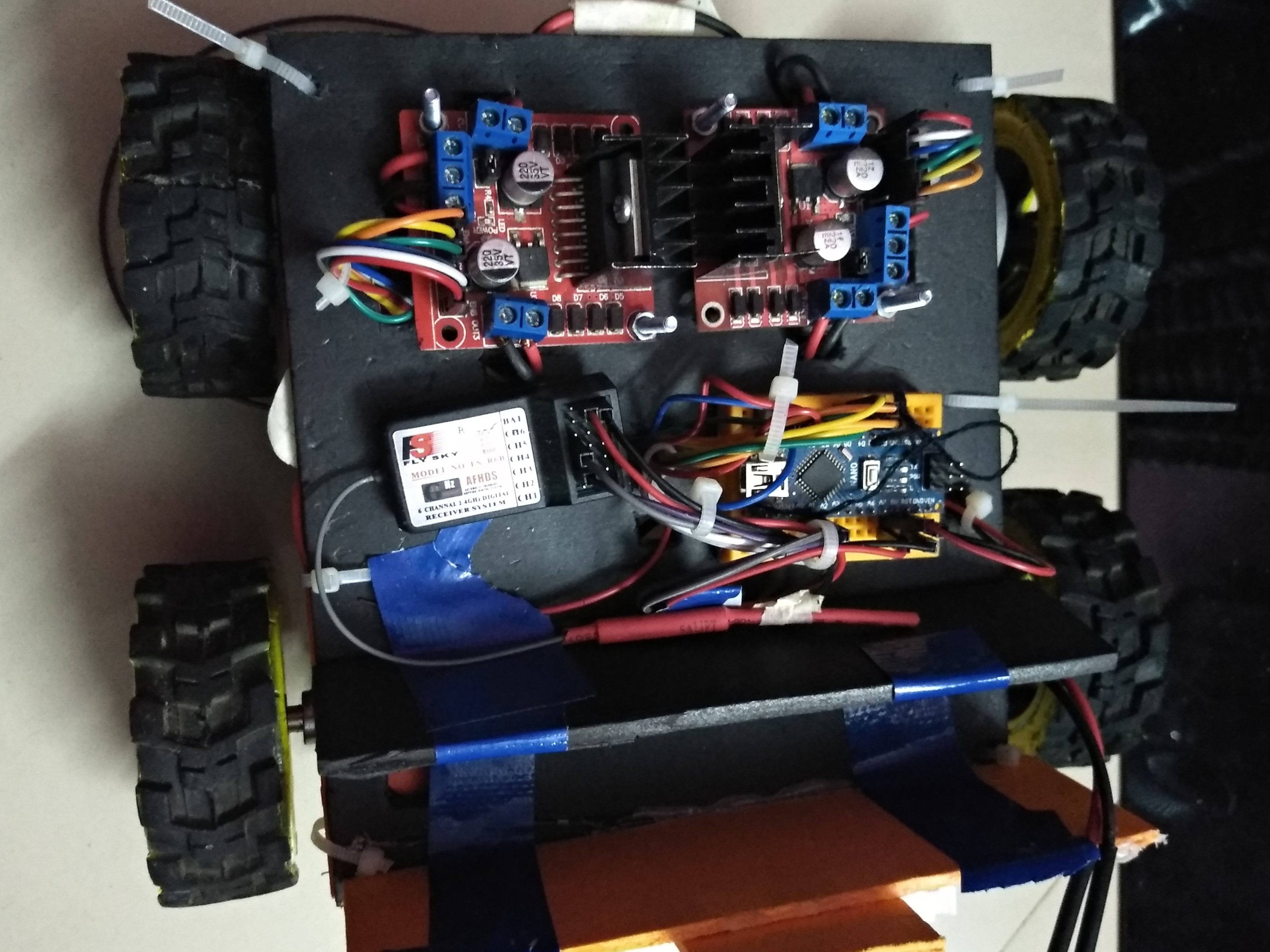
The objective of this project was to build a rescue robot which can assist in rescue missions as well as monitor the environment for temperature change and detection of toxic gasses. The robot was equipped with multiple sensors, a camera which can use a pan-tilt mechanism to observe different directions, processing equipment and an on-board first aid kit box. The robot has both autonomous and manual control and high visibility led lights to maneuver on different surfaces. The wheels are modified to get a firm grip on the surface and a siren is there to warn anyone if necessary.
Used Technologies: Arduino Nano, Raspberry Pi 3B+, Different Gas Sensors, Temperature and humidity sensor, 2.4 GHz RC Transmitter Receiver Pair, L298N Motor Driver, Arduino IDE and OpenCV.
 |
 |
 |
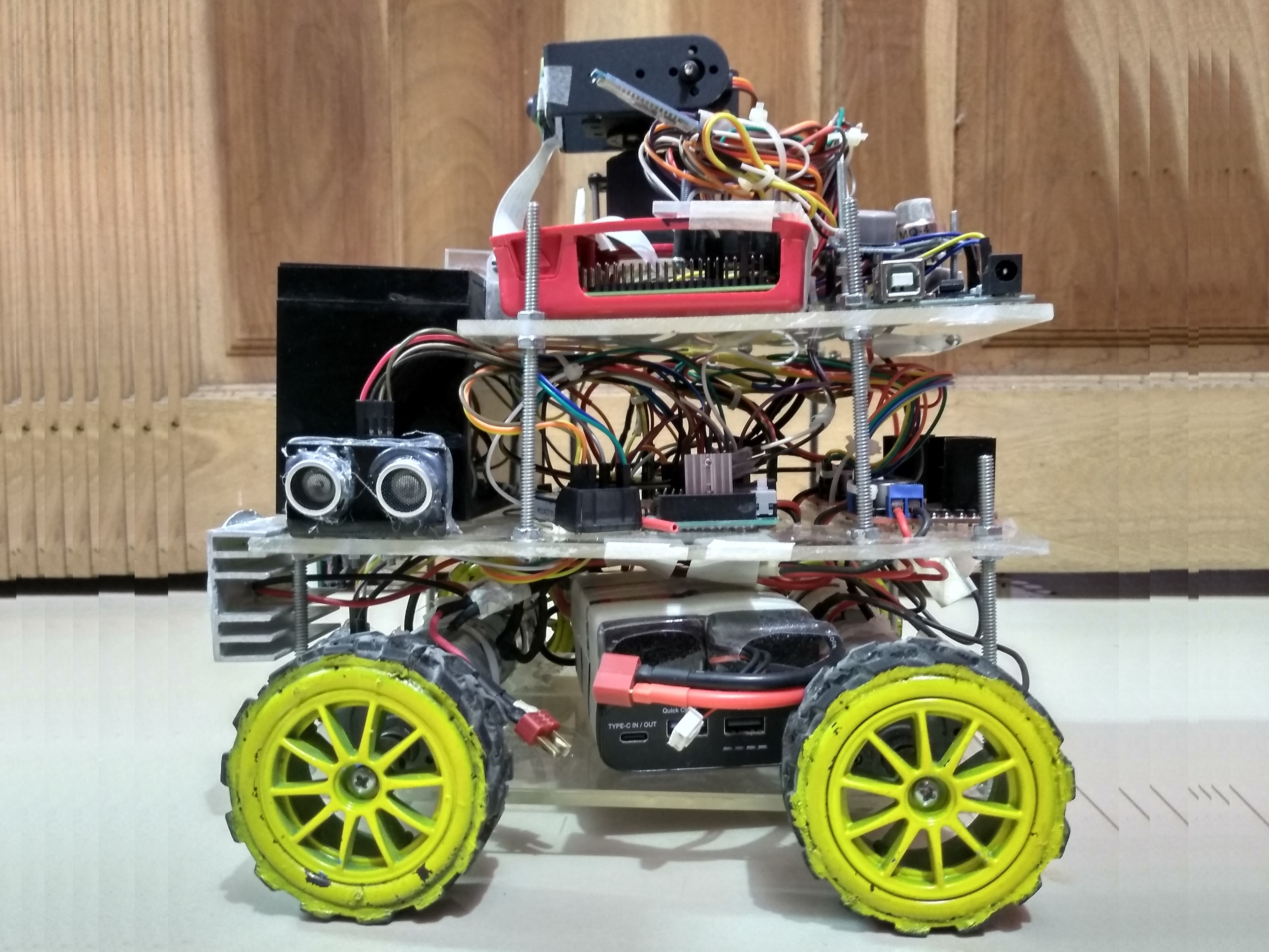 |
| Testing Different Components | Added First Aid Kit Box | Night Time Testing of the Robot | Final Test Before Project Submission |
A paper was published on this project which all the team members contributed equally. The full-text paper is available on International Journal of Mechanical Engineering and Robotics Research
Soccer Bot V.2.0 (September 2019)
Type: Contest (Team Project)
This robot was the revised version of the previous soccer bot to attend the contest Esonnance 2019 organized by Islamic University of Technology, Gazipur, Bangladesh. The contest had similar rules for different weight class. To shave off wight, we redesigned the chassis of the robot. The bracket was also redesigned. A small fan was placed at the front of the robot to get fresh air to reduce thermal throttling of the motor drivers. The lights were just for show.
Used Technologies: Arduino Nano, L298N Motor Driver, 2.4 GHz RC Transmitter Receiver Pair, DC Fan and Arduino IDE.
 |
 |
 |
 |
| Redesigned Front Bracket | Back View of the Robot | On the Contest Day | Night View of the Robot |
Soccer Bot V.1.0 (July 2019)
Type: Contest (Team Project)
This soccer bot was created to attend the contest Mecceleration 2019 organized by Islamic University of Technology, Gazipur, Bangladesh. The contest named Robo Soccer featured 59 teams participating in a day-long competition, where bots competed against each other in a miniature soccer field. Me along with my teammate, designed our soccer bot to appear bigger than average contestants to withstand the ramming of the competitor robots in the arena. I was responsible for the electronic control segments and my other team member was responsible for building the mechanical structures. A fan was placed on top of the robot to cool the electronics during the contest.
Used Technologies: Arduino Nano, L298N Motor Driver, 2.4 GHz RC Transmitter Receiver Pair, DC Fan and Arduino IDE.
 |
 |
 |
 |
| Testing Different Components | Test Run After Motor Assembly | Front Bracket to Catch the Ball | Top View of the Cooling Fan |
Battle Bot V.1.0 (April 2019)
Type: Contest (Team Project)
This battle bot was designed to participate in the contest named Robolution- 2019 organized by Military Institute of Science and Technology, Dhaka, Bangladesh. The segment had a boxing ring-like arena where contestants fought with their heavy robots. This was our first attempt at building a battle bot. So we chose wedge shapes to avoid using costly active weapons. The frame of the robot was made of iron bar but the body panels consisted of plastic pvc sheets. This was by design as under the panels, thick steel wires were placed. When opponents attack with their active weapons, they get caught on the steel wires, forcing them to forfeit.
Used Technologies: Arduino Mega, L298N Motor Drivers, 2.4 GHz RC Transmitter Receiver Pair, DC Fan and Arduino IDE.
 |
 |
 |
 |
| Draft Diagram for the Electric Components | Steel Wire Wrap on the Frame | PVC Body Panels | Final Assembly of the Robot |
220V AC Voltage Stabilizer (November 2018)
Type: Academic (Team Project)
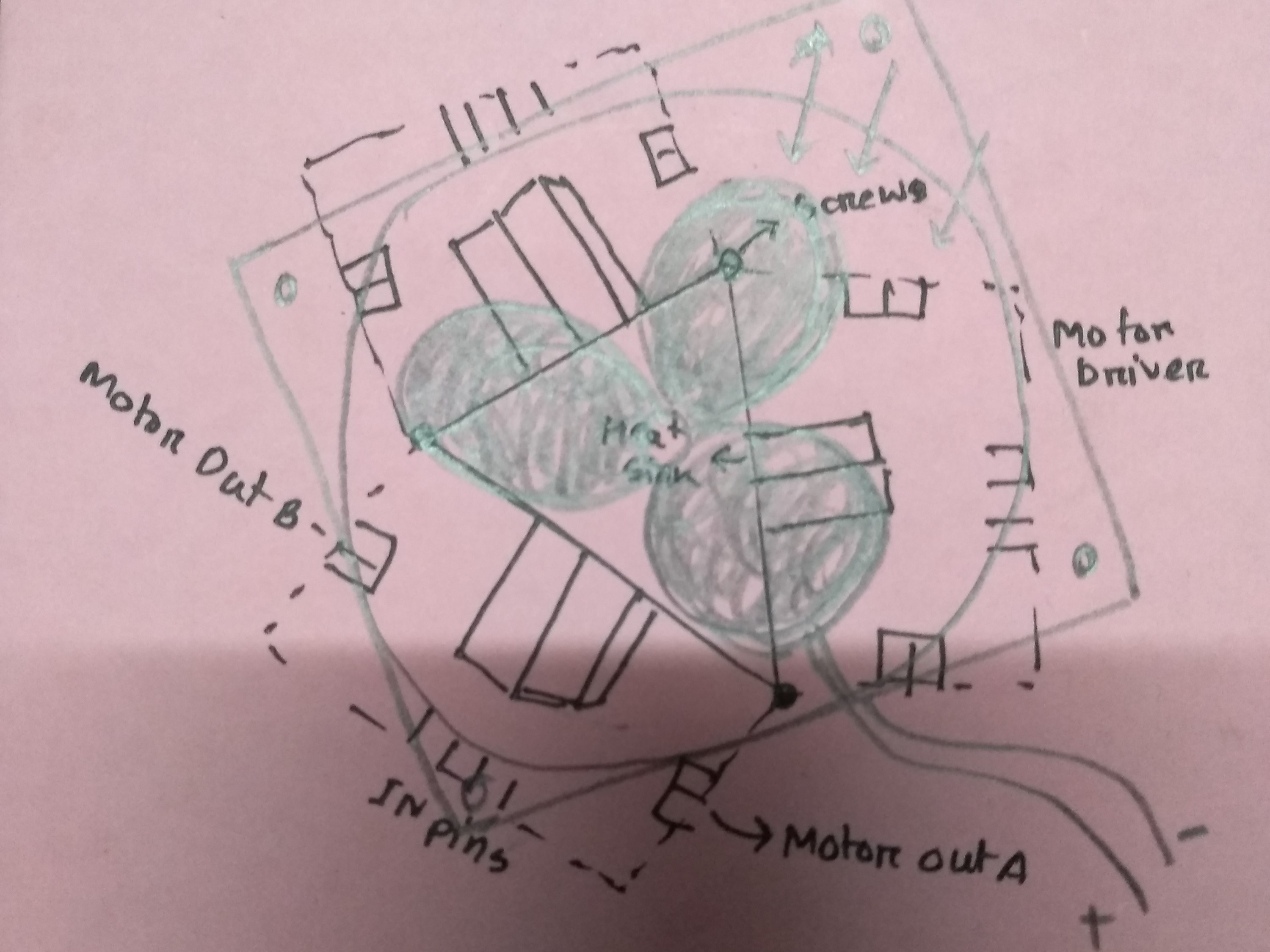
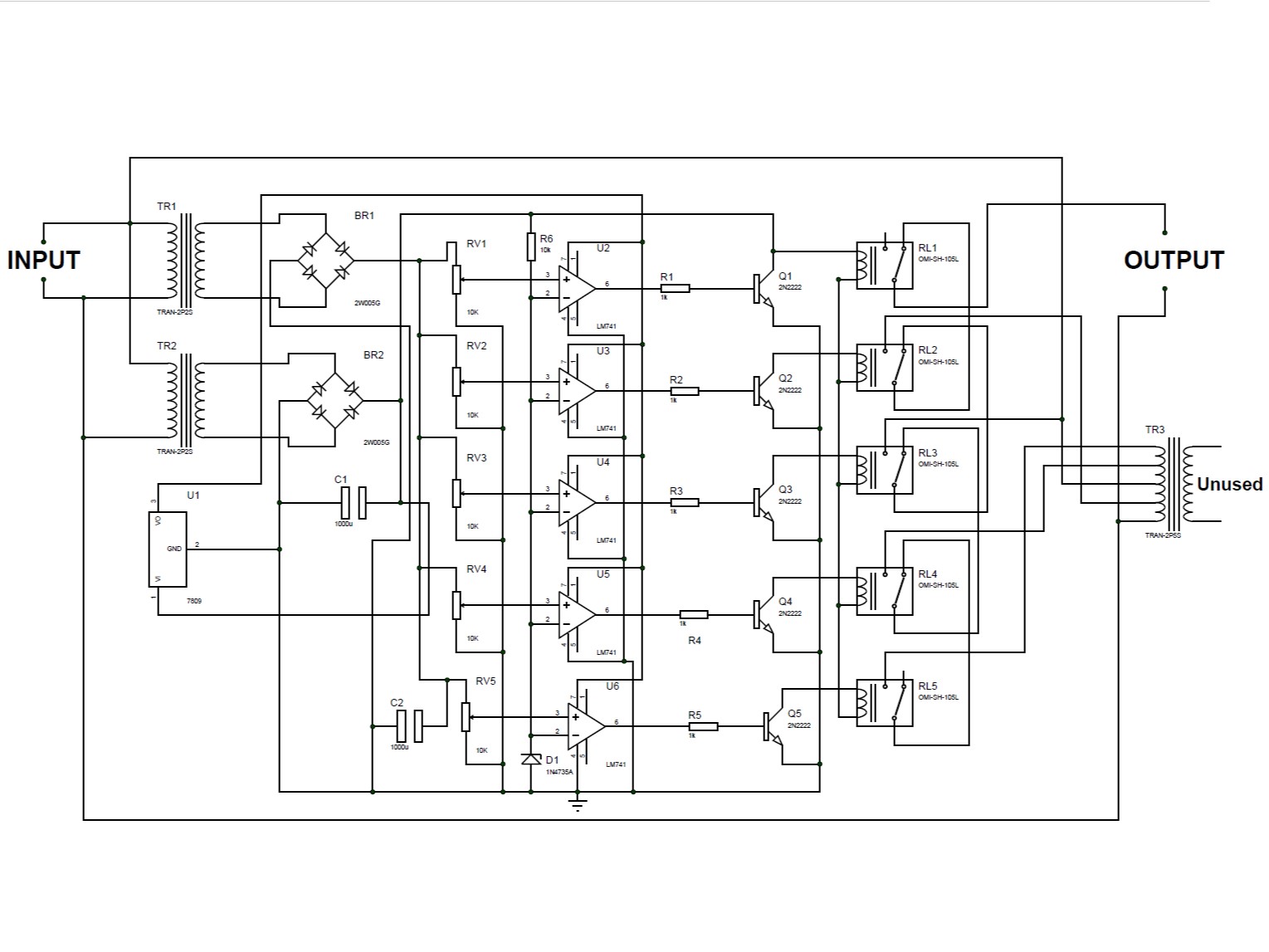
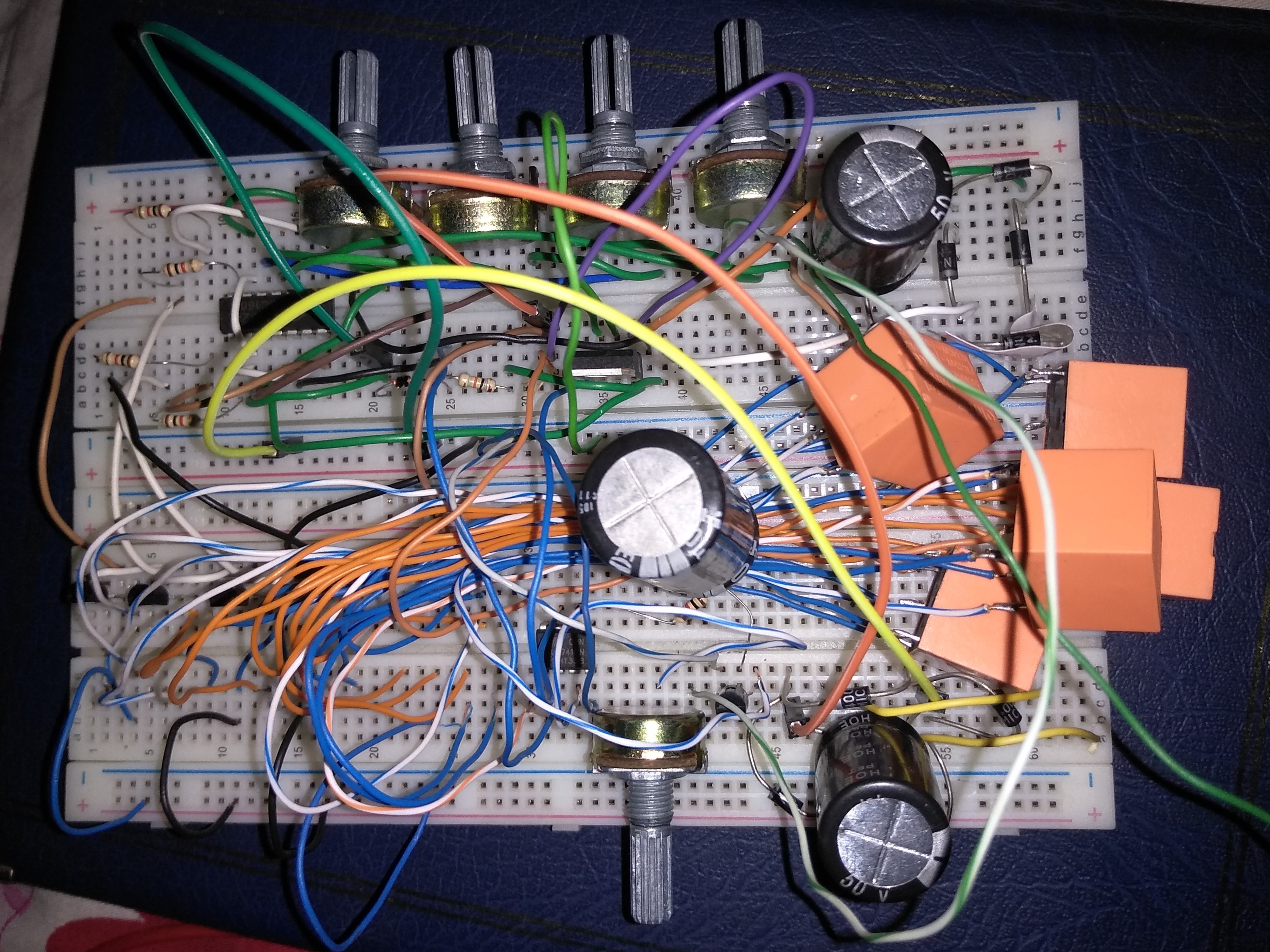
The objective of this project was to design a voltage stabilizer circuit to maintain a constant 220V voltage on the output. The circuit was implemented on a breadboard for testing and later transferred to a PCB. The circuit was designed using Operational Amplifiers, relay modules for circuit switching along with a variable transformer. We desgined the circuit, tested for different input voltages and then presented a poster on the project.
Used Technologies: Transformer, Relays, Op-Amps, Variable Resistors, Diode and Proteus (PCB Design and Circuit Simulator Software).
 |
 |
 |
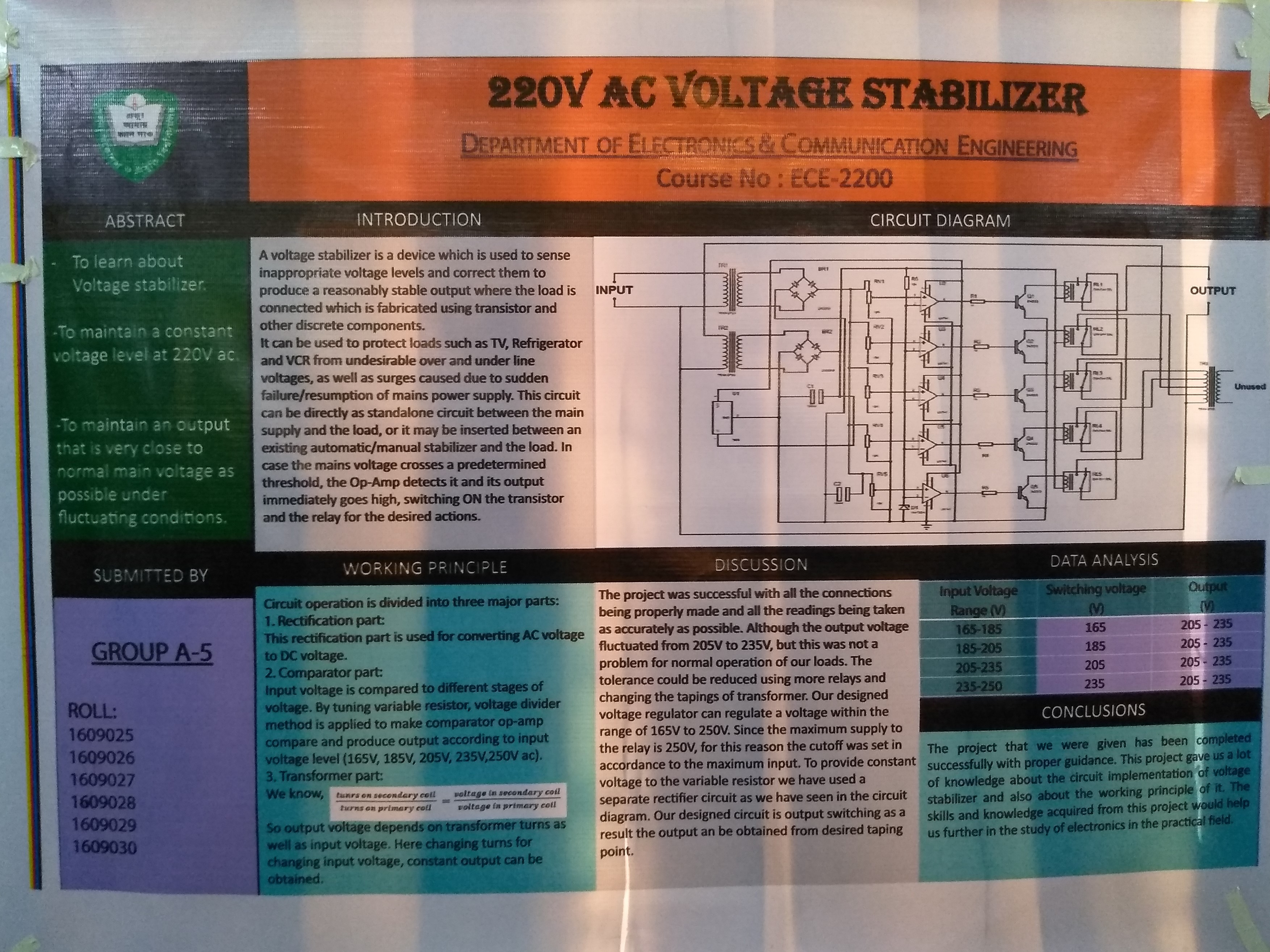 |
| Circuit Diagram for the Project | Different Component Placements on Breadboard | Testing Output | Poster Presentation on the Project |